
ProPILOT with Navi-link
ProPILOT, which assists single-lane driving on a highway, is enhanced by the addition of a function that links it to the navigation system, thereby reducing the frequency of the driver’s operations and making the driver more confident and more comfortable.
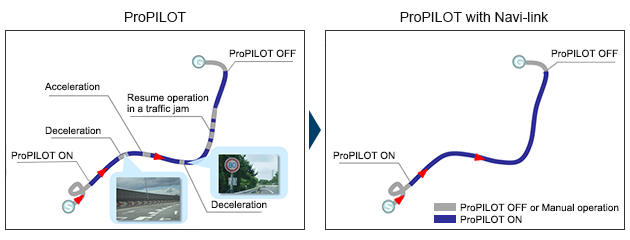
ProPILOT is a system that assists acceleration, braking, and steering operations when driving on a single-lane on a highway. As it is necessary for the driver to set the vehicle speed, the driver will also need to change the speed setting or deactivate the system in situations where the speed limit changes, when approaching a sharp curve, etc.
ProPILOT with Navi-link reduces the frequency of the driver’s operations as the system supports vehicle speed changes when the speed limit changes, as well as deceleration corresponding to the size of the curve.
System operation
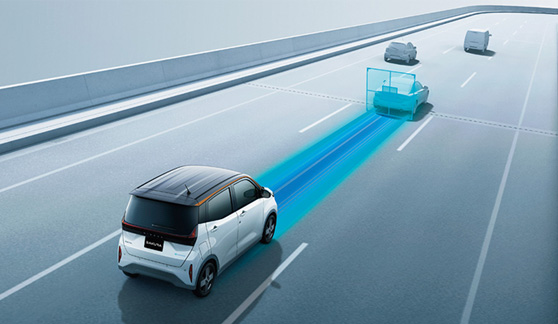
During single-lane driving on a highway or roadway, ProPILOT supports the acceleration, braking, and steering operations to keep the vehicle centered in the lane while maintaining a pre-set distance from the preceding vehicle. Vehicle speed is controlled up to the set speed specified by the driver.
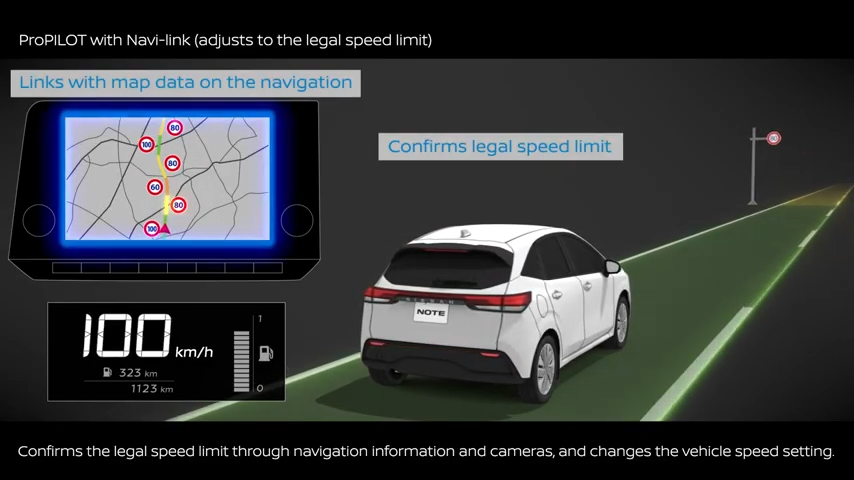
ProPILOT with Navi-link supports deceleration corresponding to the size of the curve ahead and changing the set speed by the detecting speed limit signs, through its link with the navigation system.
Even if there are two parallel roads at a junction or there is an off-ramp of a highway, the system can support by referencing the road information of the navigated route.
System mechanism
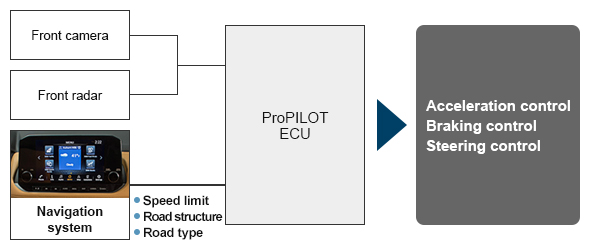
ProPILOT detects lane markers and the preceding vehicle through the front camera and radar, and controls acceleration, braking, and steering to keep the vehicle centered in the lane while maintaining a pre-set distance from the preceding vehicle.
In ProPILOT with Navi-link, road data obtained through the navigation system is also used to control these operations. When the speed limit changes, the vehicle’s speed setting is changed based on the speed limit signs identified by the front camera and road data obtained through the navigation system. It also uses road data to find out the size of the curve ahead, and decelerates corresponding to the size of the curve.
Related Technology


ProPILOT
Significantly reduces driver stress when driving on highways in several kinds of traffic conditions, making long drives more comfortable and enjoyable