
New driver-assistance technology dramatically improves collision-avoidance performance
Nissan develops automated collision-avoidance system, a fundamental technology for reducing traffic accidents and autonomous driving
Nissan believes that in the future era of automated driving, driver-assistance technology that can avoid the highly complex accidents that occur in the real world will be essential to ensure customer peace of mind.
Nissan develops an advanced driver-assistance technology that dramatically enhances collision-avoidance performance with the ground truth perception technology.
Nissan advances technology toward autonomous driving with ground truth perception2:10
How technology works
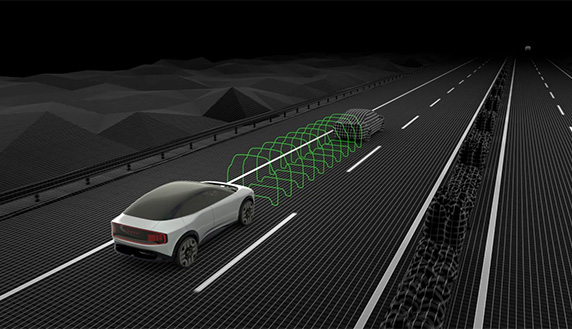
Instantaneous decision and maneuver with real-time precise recognition of surroundings
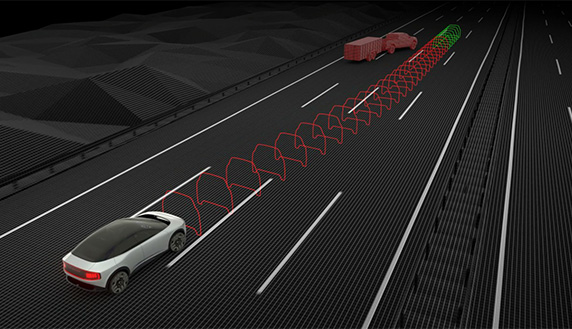
Avoiding overturned trailer
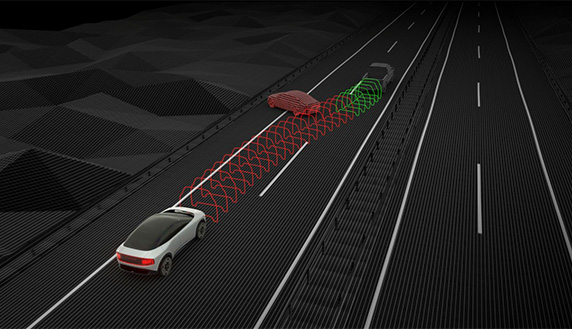
Avoiding a suddenly stopped car
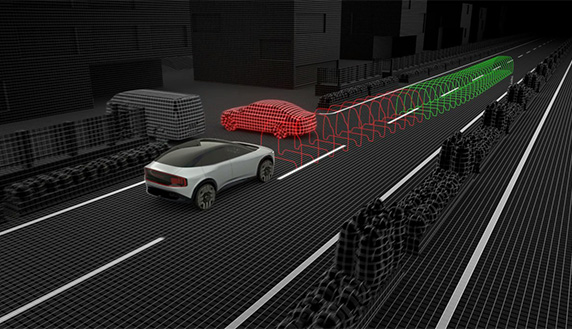
Emergency maneuvers in complex situations
Moreover, it can avoid collision with flying object by precise 3D space recognition
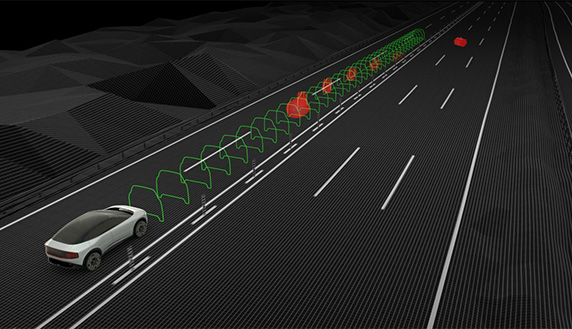
Avoiding flying object
Mechanism
System configuration

Unique algorithm development
Nissan's unique perception and vehicle-control algorithm enables instantaneous recognition and decision
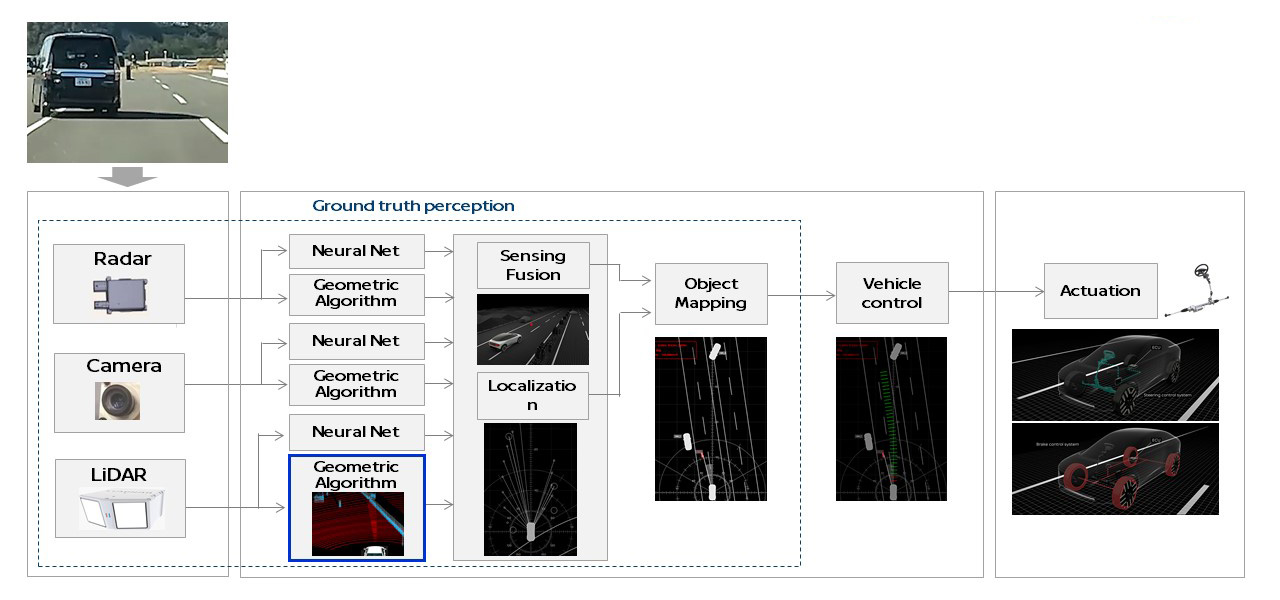
Ground truth perception technology
Ground truth perception is precise 3D perception of the vehicle’s surroundings by fusion of next-generation LiDAR, camera and radar. Especially, significantly improved ranging, field of view and resolution of the LiDAR allows full performance utilization.
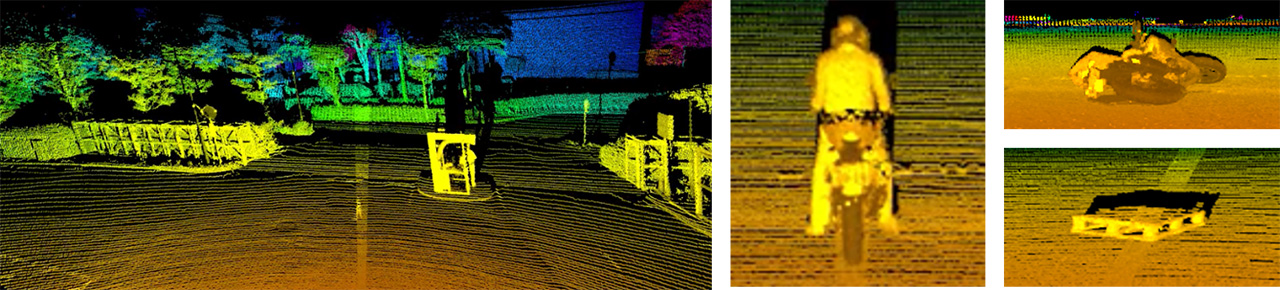
1. Next-generation LiDAR
Precisely reproduces space and objects like 3D printer
2. Camera
Recognize scene context – vehicle category, road structure, traffic sign, character

3. Radar
Recognizes motion (distance, speed) of surrounding objects

ProPILOT: Concept Zero test vehicle
- April 2022: Nissan revealed its latest test vehicle with ground truth perception technology, demonstrating how the car can automatically perform collision-avoidance maneuvers.
- Jun 2023: Nissan added intersection collision avoidance capability, showcasing the technology's ability in the more complex environments.

Demonstrations

Emergency maneuvers in complex situations 1

Emergency maneuvers in complex situations 2

Intersection collision avoidance
Accidents caused by driver error at intersections can unfortunately result in significant consequences. The in-development system is therefore being designed to provide improved assistance in difficult situations through advanced sensing and decision-making capabilities.

Related Technology

Toward fully autonomous drive
Nissan is advancing driver support technology development, toward the fully autonomous drive of the near future that anyone can use with ease.

Nissan’s Safety Technology Development Concept
Create a society with virtually zero avoidable traffic accidents

ProPILOT 2.0
Driver assistance technology, combining navigated highway driving with hands-off single-lane driving capabilities

ProPILOT Remote Park
You can move your car in and out of a parking spot by operating the Intelligent Key from outside the car