
クルマの緊急回避性能を飛躍的に向上させる運転支援技術
交通事故の低減および自動運転の基盤技術となる、緊急回避操作の自動化を目指す
日産は、将来の自動運転の時代において、お客さまに安心してクルマを使っていただくためには、世の中で起こる多次元に複雑な事故を回避するための運転支援技術が必須であると考えています。
日産は「グラウンド・トゥルース・パーセプション技術」により高度な車両制御を実現し、緊急回避操作の自動化を飛躍的に進歩させます。
クルマの緊急回避性能の飛躍的な向上につながる運転支援技術、グラウンド・トゥルース・パーセプション技術を公開2:00
技術の働き
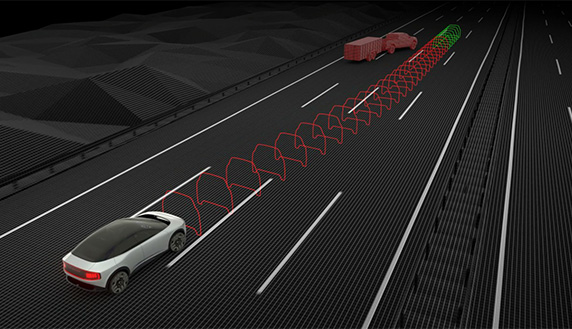
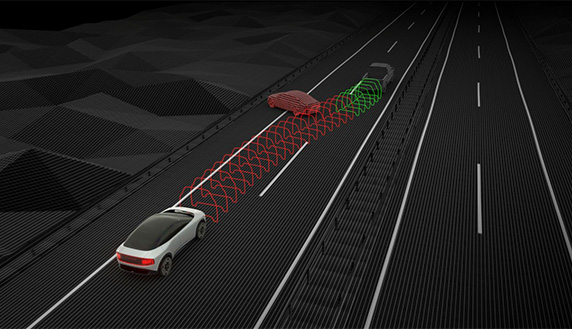
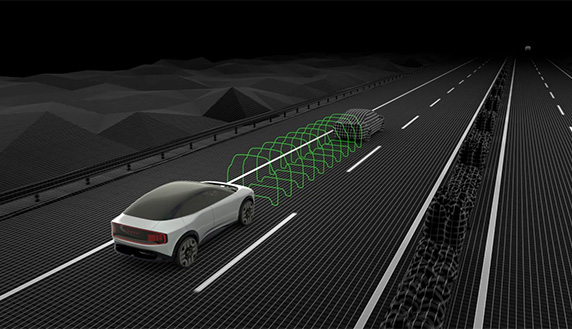
時々刻々と変化する状況を遅れなく正確に把握し、瞬時の判断で衝突の危険を回避します。
トレーラー横転
前方車両急停止
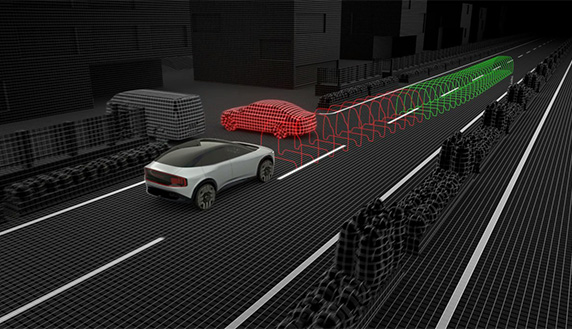
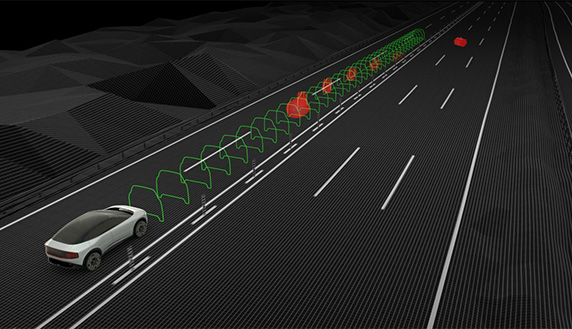
複雑なシーンでの動作事例
さらに正確な三次元空間の把握により、飛来する危険物との衝突の危険も回避します。
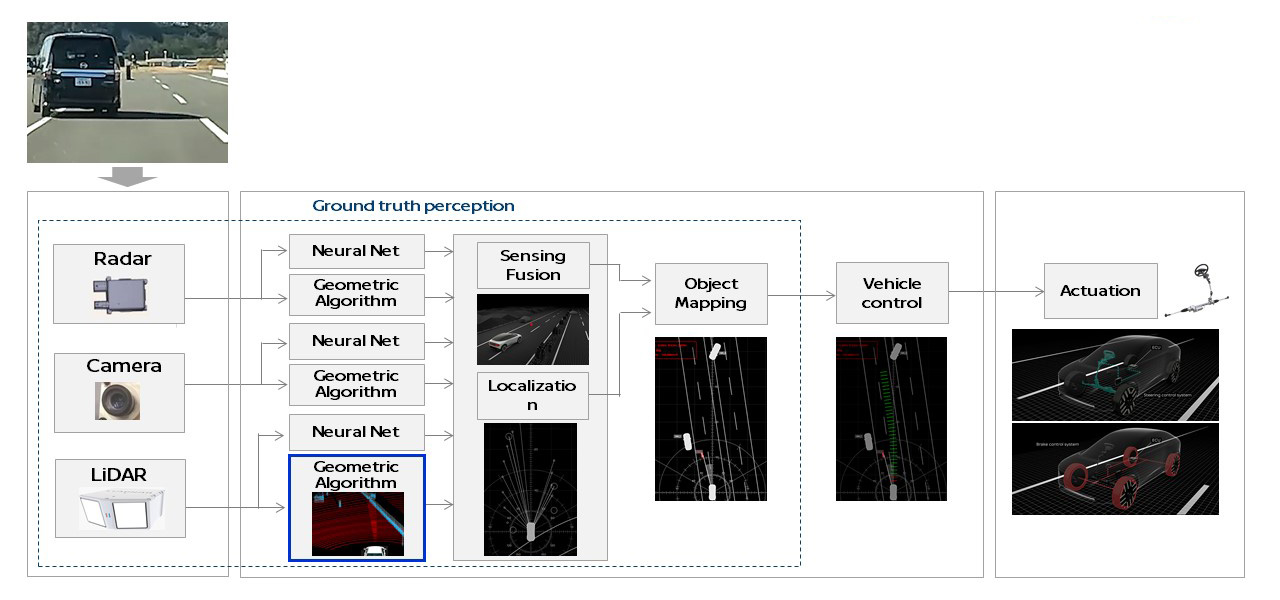
技術の仕組み
システム構成

日産独自のアルゴリズム開発
独自のセンシング・車両制御アルゴリズムにより瞬時の状況判断と操作を実現します。
グラウンド・トゥルース・パーセプション技術
次世代LiDAR・カメラ・レーダーのセンサーフュージョンにより、周囲の形状・位置を格段に高い精度で3次元計測が可能になる技術です。
特に次世代のLiDARは検知距離、検知範囲、分解能ともに大幅に向上し、本来の利点を発揮します。
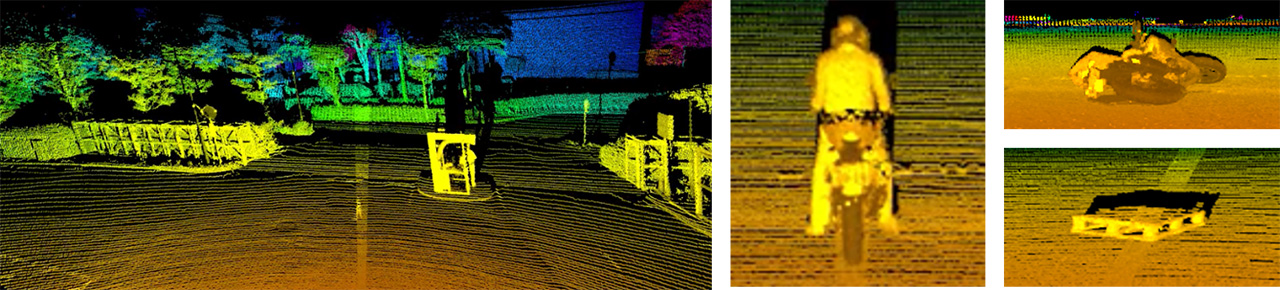
1. 次世代LiDAR
1. 空間の構造と物体の形・位置 を3Dプリンタのように正確に再現。
2. カメラ
車両と道路構造の区別、車両の種類、標識の文字や数字などシーンの意味(Context)を理解

3. レーダー
周囲の移動物の動き(距離と速度)を把握

ProPILOT - コンセプトゼロ 試作車
- 2022年4月:グラウンド・トゥルース・パーセプション技術を搭載した最新の試作車を発表。
自動で緊急回避操作を行うデモンストレーションを公開。 - 2023年6月:新たに交差点での事故を回避する技術を公開。

デモンストレーションの様子

連続する危険の回避 その1

連続する危険の回避 その2

交差点事故の回避
交差点での出会い頭の事故は、信号や標識の見落としなどのドライバーの不注意により発生し、重大な被害につながります。
本技術がドライバーを支援することにより、事故低減に大きく貢献します。

関連技術

完全自動運転に向けた取り組み
将来の完全自動運転に向けて、誰でも安心して使える運転支援技術開発の推進

日産の安全への取り組み
交通事故のない社会を目指して
")
プロパイロット 2.0 (インテリジェント高速道路ルート走行)
高速道路で同一車線内ハンズオフが可能なナビ連動ルート走行を実現したシステム

プロパイロット リモート パーキング
車外からのインテリジェントキー操作で、駐車場のクルマを出し入れすることができます