
プロパイロット 2.0 (インテリジェント高速道路ルート走行)
最終更新:2026年5月
高速道路で同一車線内ハンズオフが可能なナビ連動ルート走行を実現したシステム
「プロパイロット 2.0」では、ナビゲーションシステムで目的地を設定し、高速道路の本線に合流するとナビ連動ルート走行を開始できます。ルート走行を開始すると追い越しや分岐なども含めてシステムがルート上にある高速道路の出口までの走行を支援し、ドライバーが常に前方に注意して道路・交通・自車両の状況に応じ直ちにハンドルを確実に操作できる状態にある限りにおいて同一車線内でハンズオフが可能となり、ドライバーの運転操作を幅広く支援します。また、ナビゲーションと周囲360度のセンシング情報に基づいて、ルート走行中の分岐や追い越しのための車線変更の適切な開始タイミングをシステムが判断し、ドライバーに提案します。そして、ドライバーがハンドルに手を添え、スイッチ操作で承認することで、車線変更支援を開始します。
更に、高精度な衛星測位技術を導入することで、多数の車線が存在する道路や一般道が並走する複雑な道路環境でも、正確な車線変更支援を実現します。

技術の働き
ナビゲーションシステムで設定したルート上の高速道路*1の本線に合流し、ナビ連動走行が可能になるとディスプレイの表示と音でドライバーに知らせます。
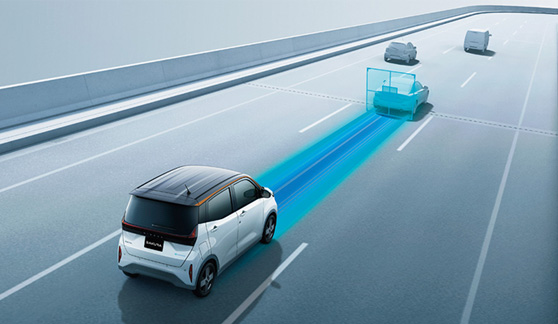
ドライバーがスイッチ操作でナビ連動走行を開始すると、ドライバーが設定した速度を上限に、先行車両との車間距離を一定に保ちながら車線中央を走行するよう支援します。同一車線走行時にはドライバーが常に前方に注意し、道路・交通・自車両の状況に応じ直ちにハンドルを確実に操作できる状態にある限りにおいて、ハンズオフが可能となります*2。
前方にドライバーが設定した速度より遅い車両が走行している場合、システムが追い越し可能と判断するとディスプレイへの表示と音でドライバーに提案します。ドライバーがハンドルに手を添えてスイッチ操作で承認すると、右側の車線へ車線変更します。追い抜きが完了すると、車線変更可能なタイミングをシステムが判断し、同様の操作で元の車線へと戻ります。
ドライバーが自分の意思で車線変更を行いたいときには、ハンドルに手を添えて方向指示器を操作し、システムが車線変更可能と判断すると車線変更します。
ルート上の高速道路出口に近づくとディスプレイの表示と音でドライバーに知らせ、連絡路へ分岐した後、ナビ連動ルート走行を終了します。
- 高速自動車国道法の定める高速自動車国道、及び、道路法の定める自動車専用道路
- 対面通行路、トンネル内、急なカーブ路、料金所・合流地点及びその手前などでは、ハンズオフできません。ハンズオフができない区間に入るときにはシステムが事前にドライバーに報知するので、ドライバーはハンドル操作をする必要があります。
ナビ連動ルート走行機能

技術の仕組み
3D高精度地図データ、車両の周囲360度のセンシング、インテリジェントインターフェース、高精度な衛星測位技により、インテリジェント高速道路ルート走行を実現します。
1. 3D高精度地図データ
高速道路の形状をセンチメーターレベルの細かさでデータ化した地図データで、全てのレーンの区分線情報と速度標識、案内標識などの情報を含んでいます。

2. 車両の周囲360度のセンシング
7個のカメラ、5個のレーダー、12個のソナーで、白線、標識、周辺車両を検知します。



3. インテリジェント インターフェース
道路、周囲の状況、制御の状態をリアルタイムに伝え、車線変更のタイミングをインタラクティブに決定します。

4. 高精度な衛星測位技術
3D高精度地図データを参照するにあたり、GNSS*3により計測した自車位置情報を用いています。
通常、GNSSによる位置精度は10~15mの誤差を有しますが、センチメータ級の精度が必要な測量等で用いられる高度な技術により、自車走行レーンまで正確に特定します。

- GNSS:Global Navigation Satellite Systemの略で、GPSに代表される全地球測位衛星システム
- コード測位:衛星から電波で発信される情報をもとに測位する方法
- 搬送波位相測位:衛星が発信している電波そのものを解析することで精度を高める方法
関連技術

プロパイロット リモート パーキング
車外からのインテリジェントキー操作で、駐車場のクルマを出し入れすることができます
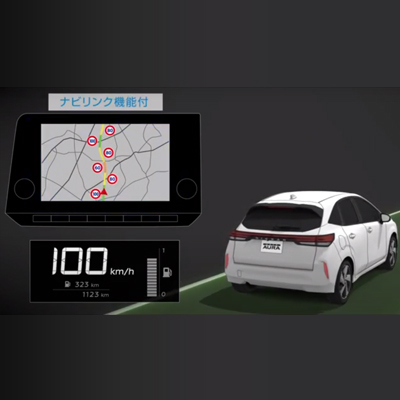
プロパイロット(ナビリンク機能付)
高速道路での同一車線走行時の運転操作をサポートするプロパイロットの機能に、ナビゲーションシステムとの連携機能を加えることで、ドライバーの操作頻度を低減し、ドライブをさらに安心かつ快適なものにします

プロパイロット パーキング
スイッチ操作だけで、駐車時に必要なすべての操作をシステムが自動で制御し、駐車を支援する技術です
プロパイロット
高速道路の渋滞走行や長時間の巡航走行時に感じていたストレスを大幅に低減し、もっとロングドライブを楽しむことができる