Research field 研究分野

自動運転
“自動運転による未来の移動のあり方やモビリティ社会を自ら創造し具現化します”
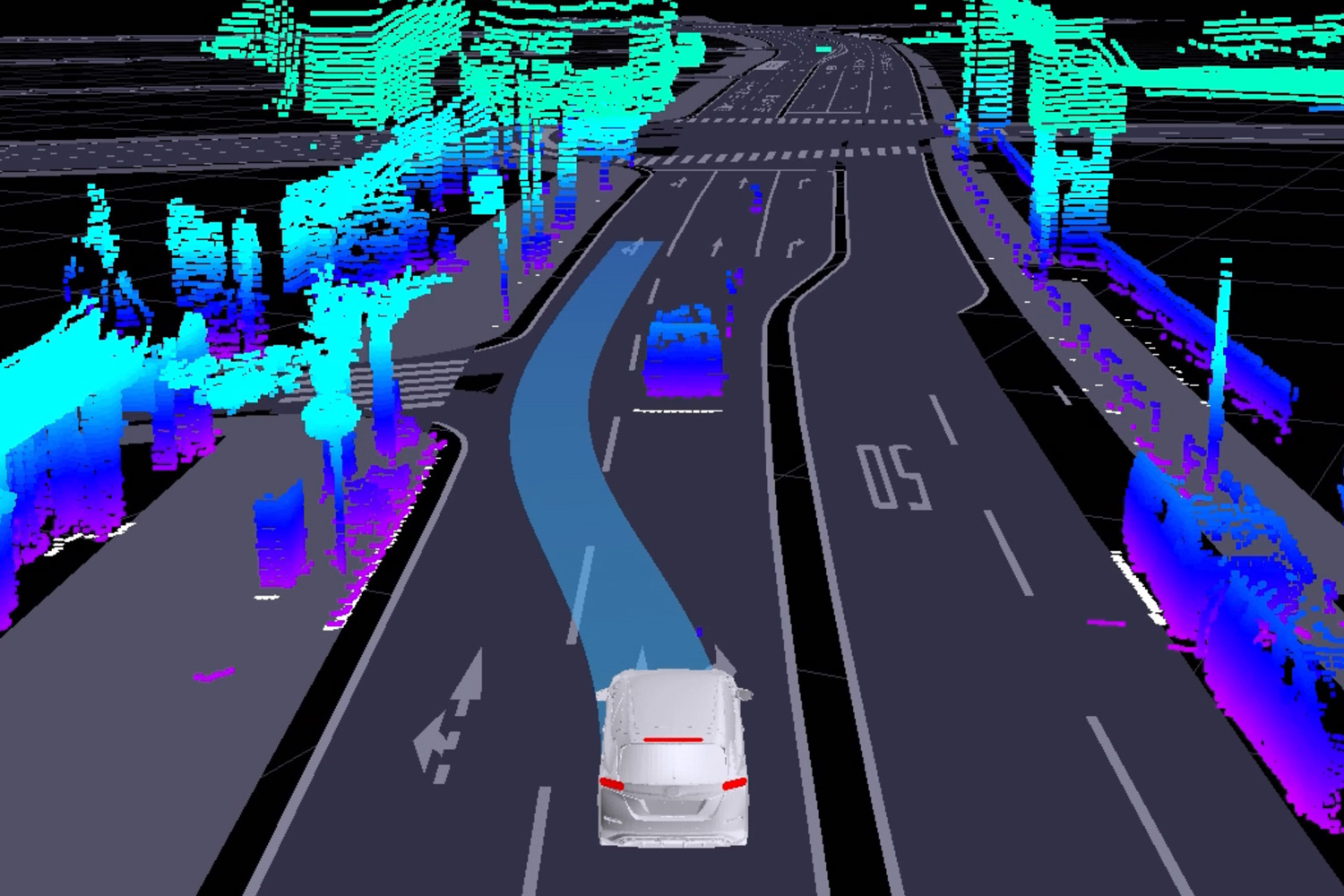
総合研究所 モビリティ&AI研究所では、ドライバーレス自動運転によるモビリティサービスの事業化に向けた取り組みを加速しています。横浜やイギリスにて、実証運行や技術検証を行いながら、利便性や社会受容性の評価を進めています。カメラ、レーダー、ライダーによる外界センシングシステムや、ドライバーレス走行が可能な制御システムを持った実験車両を導入し、安全性と信頼性を検証しています。こうした取り組みを通じて、少子高齢化に伴う公共交通機関のドライバー不足や地域社会が抱える交通サービスの課題解決に貢献し、自動運転技術を活用して誰もが自由に移動できる新しい交通サービスを提供することを目指しています。




自動運転 実証実験
横浜みなとみらい地区でドライバーレス自動運転の実証や、イギリスでの欧州交通環境での自動運転技術開発を行っています。
- 制御工学
- 計算科学
- 情報工学
- データサイエンス
- 人工知能(AI)
- 都市・交通工学
- システム工学
自動運転 技術開発
市街地環境での自動運転実現に必要な、AIモデルやソフトウェア・アルゴリズム開発を進めています。
- 制御工学
- 計算科学
- 情報工学
- データサイエンス
- 人工知能(AI)
自動運転 安全性検証
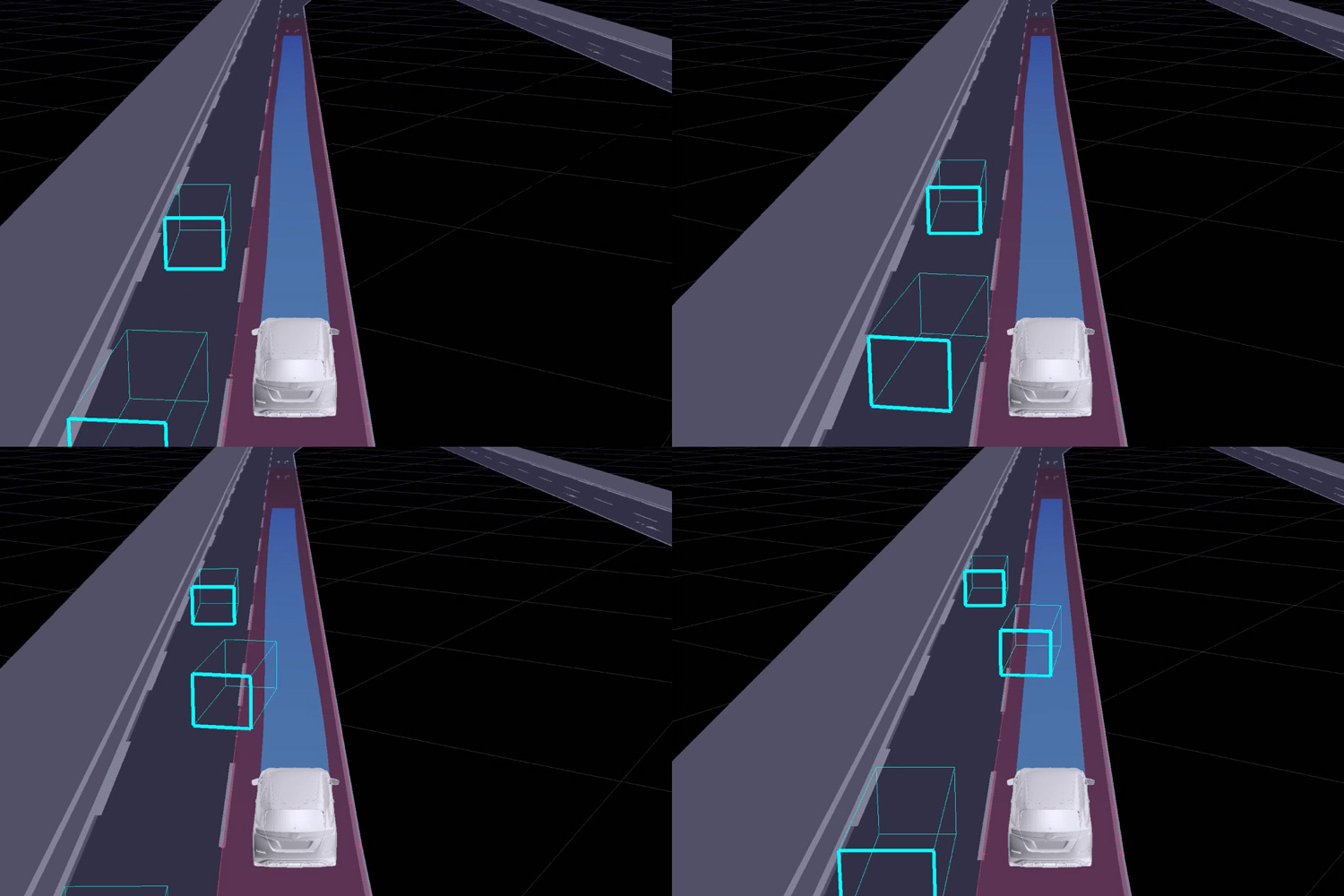
複雑な交通環境下で起こりうる様々なシナリオについて、シミュレーションを用いて大規模な検証を行っています。
- 制御工学
- 情報工学
- データサイエンス
- 人工知能(AI)
- システム工学
関連受賞:
[1] “第71回自動車技術会賞 論文賞”, 乗員の快適性を向上させる車両運動の探求, 2021;
[2] “2024年自動車技術会秋季大会 講演発表賞”, 市街地自動運転に向けた縦横統合制御のためのリスク時空間マップを用いた走行可能領域境界生成手法, 2024;
[2] “2024年自動車技術会秋季大会 講演発表賞”, 市街地自動運転に向けた縦横統合制御のためのリスク時空間マップを用いた走行可能領域境界生成手法, 2024;
関連論文:
[1] “Would you trust a vehicle merging into your lane? Subjective evaluation of negotiating behaviour in a congested merging scenario”, 16th IEEE/SICE International Symposium on System Integration, 2023;
[2] “マルチモーダルLLMを用いた自動運転のための生成軌道の説明”, 画像の認識・理解シンポジウムMIRU (電子情報通信学会), 2024;
[3] “Trajectory Explanation using Multimodal LLM for Autonomous Driving”, The IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024;
[4] “市街地自動運転に向けた流体力学を用いた簡易モデルによる歩行者経路予測手法”, 秋季大会 (自動車技術会), 2024;
[5] “英国での自動運転研究プロジェクト ServCityにおける市街地走行の取り組み 交通流に乗るためのインフラカメラによる停止車両検出に基づく走行車線計画”, 秋季大会 (自動車技術会), 2024;
[6] “市街地自動運転に向けた遠隔監視システムにおけるスタック検出技術”, 秋季大会 (自動車技術会), 2024;
[7] “市街地自動運転に向けた物体認識性能向上のためのLiDAR点群と静止構造物点群地図の高精度重畳技術”, 秋季大会 (自動車技術会), 2024;
[8] “市街地自動運転に向けた縦横統合制御のためのリスク時空間マップを用いた走行可能領域境界生成手法”, 秋季大会 (自動車技術会), 2024;
[9] “Explanation for Trajectory Planning using Multi-modal Large Language Model for Autonomous Driving”, 2nd Workshop on Vision-Centric Autonomous Driving (European Computer Vision Association), 2024;
[10] “Towards Personalised Merging Behaviours: Enhancing Automated Vehicle Trust through Surrounding Driver’s Style Adaptation”, 17th IEEE/SICE International Symposium on System Integrations (SII), 2025;
[11] “マルチモーダル言語モデルと拡散ポリシーによる自動運転行動計画の検討”, 画像の認識・理解シンポジウムMIRU (電子情報通信学会), 2025;
[12] “オンボードLLMによるAPI呼び出しの整合性向上に向けた実践的検討:小規模モデルを用いたアプローチ”, 第20回言語処理若手シンポジウム (言語処理学会), 2025;
[13] “市街地自動運転に向けた高精度正着のための複数座標系評価関数を用いた停車位置姿勢制御技術”, 秋季大会 (自動車技術会), 2025;
[2] “マルチモーダルLLMを用いた自動運転のための生成軌道の説明”, 画像の認識・理解シンポジウムMIRU (電子情報通信学会), 2024;
[3] “Trajectory Explanation using Multimodal LLM for Autonomous Driving”, The IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024;
[4] “市街地自動運転に向けた流体力学を用いた簡易モデルによる歩行者経路予測手法”, 秋季大会 (自動車技術会), 2024;
[5] “英国での自動運転研究プロジェクト ServCityにおける市街地走行の取り組み 交通流に乗るためのインフラカメラによる停止車両検出に基づく走行車線計画”, 秋季大会 (自動車技術会), 2024;
[6] “市街地自動運転に向けた遠隔監視システムにおけるスタック検出技術”, 秋季大会 (自動車技術会), 2024;
[7] “市街地自動運転に向けた物体認識性能向上のためのLiDAR点群と静止構造物点群地図の高精度重畳技術”, 秋季大会 (自動車技術会), 2024;
[8] “市街地自動運転に向けた縦横統合制御のためのリスク時空間マップを用いた走行可能領域境界生成手法”, 秋季大会 (自動車技術会), 2024;
[9] “Explanation for Trajectory Planning using Multi-modal Large Language Model for Autonomous Driving”, 2nd Workshop on Vision-Centric Autonomous Driving (European Computer Vision Association), 2024;
[10] “Towards Personalised Merging Behaviours: Enhancing Automated Vehicle Trust through Surrounding Driver’s Style Adaptation”, 17th IEEE/SICE International Symposium on System Integrations (SII), 2025;
[11] “マルチモーダル言語モデルと拡散ポリシーによる自動運転行動計画の検討”, 画像の認識・理解シンポジウムMIRU (電子情報通信学会), 2025;
[12] “オンボードLLMによるAPI呼び出しの整合性向上に向けた実践的検討:小規模モデルを用いたアプローチ”, 第20回言語処理若手シンポジウム (言語処理学会), 2025;
[13] “市街地自動運転に向けた高精度正着のための複数座標系評価関数を用いた停車位置姿勢制御技術”, 秋季大会 (自動車技術会), 2025;