2024.3.31
生命らしいモビリティってどんな存在?人工生命が拓く、自律的なパートナーシップの可能性
もしも生命を人工的に再現できたら、どのようなプロダクトが生まれるのか。そんな問いにリアリティをもたらすのが、生命のもつ基本的な性質をアルゴリズムに落とし込み、コンピュータ上で再現しようと試みる人工生命の研究です。その成果をモビリティに応用したら、どのような可能性が拓けるのでしょうか。また、生命らしいモビリティと人間はどのような関係を結ぶことになるのでしょうか。
今回、お話をうかがったのは、筑波大学で研究に勤しみながら株式会社ConnectSphereの代表取締役も務める岡瑞起先生。学問と社会実装との間を往復する人工生命研究者からの“問いかけ”とは?

岡 瑞起
筑波大学システム情報系 准教授/株式会社ConnectSphere代表取締役。2003年に筑波大学第三学群情報学類を卒業したのち、同大学院博士課程を修了。博士(工学)。専門は人工生命、ウェブサイエンス、データサイエンス。著書に『作って動かすALife ―実装を通した人工生命モデル理論入門』『ALIFE | 人工生命 ―より生命的なAIへ』。
人工生命とは、「自律性」を備えた人工物
──岡先生は2022年に、初の単著となる『ALIFE | 人工生命 ―より生命的なAIへ』を上梓されました。書名にも含まれている「人工生命」について、あらためて教えてください。
人工生命とは、「人工的につくられた生命」です。そして、例えば「自己を複製する」、「自らの意志で自律的に動く」といった生命一般がもつ性質をアルゴリズムによって再現することを目指しているのが人工生命研究になります。最終目的は、地球に存在する生命のように、絶え間なく進化し続ける「オープンエンドな進化」を作り出すことです。
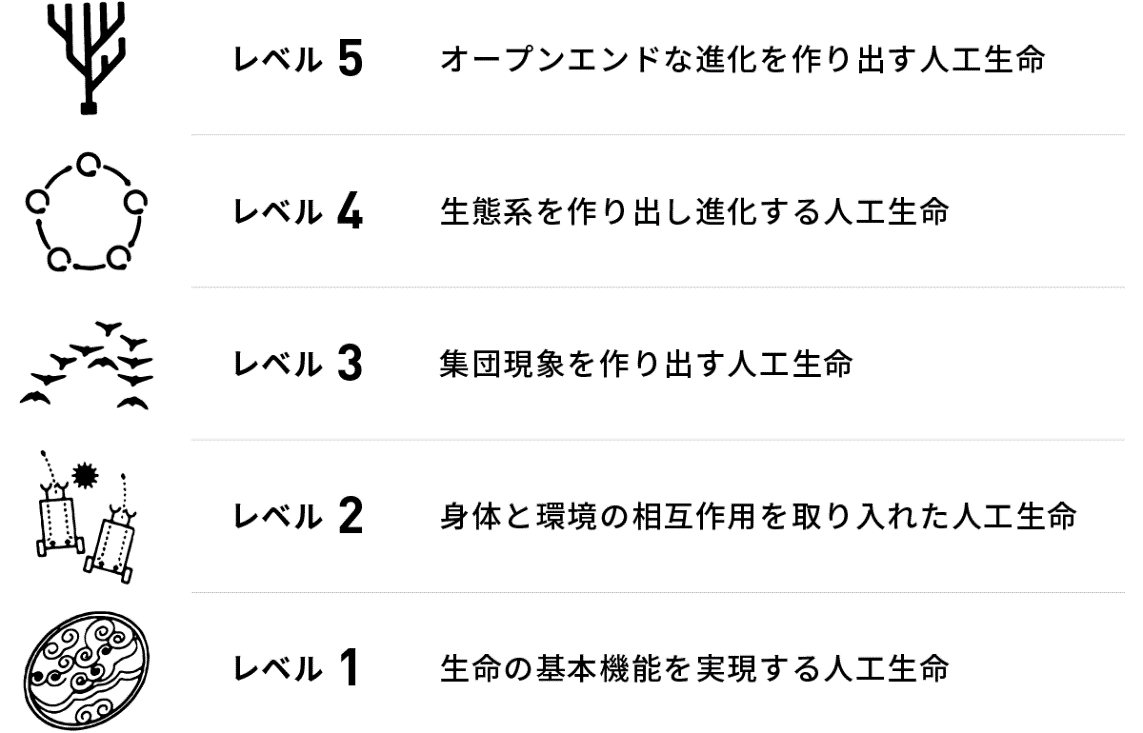
そこに至るアプローチは5段階に分けることができます。まずレベル1は、自己複製といった生命の基本機能を実現する人工生命。レベル2は、身体と環境の相互作用を取り入れた人工生命。レベル3は、群れなどの集団現象を作り出す人工生命です。さらに、レベル4では生態系を作り出して進化し、最終的にレベル5で、終わりのない「オープンエンドな進化」を作り出します。
いわば、フランケンシュタインのような「生き物」を作るというよりは、「生命らしさ」をシミュレーションしたプログラムやロボットを生み出そうとしているのです。
──既に人工生命を作り出すことを実現した例はありますか。
レベル2の実例としてわかりやすいのが、お掃除ロボットのルンバでしょう。ルンバは、ロドニー・ブルックスという著名なロボット研究者が2002年に開発しました。その特徴は、人間が細かく制御せずとも自律的に動き回り、障害物や壁を回避して移動し続けることです。従来のロボットであれば、あらかじめ部屋の形を学習させ、移動ルートを決めてあげる必要がありました。家具の配置が変わってしまったら、ぶつかって動けなくなっていたわけです。ルンバの移動の仕方はあまりスマートとはいえませんが、少なくとも掃除が終わるまでは動き続けてくれます。
ブルックスは、こうした自律性をルンバにもたせるために、虫の動きを参照したといいます。虫はエサにまっすぐ向かわずに、しばしばランダムな動きを繰り返しながら先に進んでいきますよね。つまり、虫は「エサを認識してから、そこに移動する」のではなく、「まず周囲を動き回って、エサらしきものに触れたら掴む」というアルゴリズムで動いているのではないか。そんな仮説から、ルンバの原形が生まれたそうです。こうした、鳥や虫などの生物の不思議な行動原理から、新たなアルゴリズムを抽出することも、人工生命研究の仕事のひとつです。

──人工生命の研究を応用すれば、人間が制御せずとも、自ら判断し動いてくれるモビリティが誕生するかもしれないということですね。大きな可能性を感じる一方で、少し怖さも感じてしまいます。
まさにその恐怖が、人工生命を実用化する際のハードルになると長年考えられてきました。お掃除ロボットぐらいであればまだリスクも小さいですが、それこそ飛行機や自動車が自律性をもって動き回ったら怖いですよね。
ただ最近、人々はこの恐怖を少しずつ克服しはじめているようにも思います。そのきっかけは、大規模言語モデルを用いたAIの登場です。例えばChatGPTの挙動は、「決まった問いに決まった答えを返す」という従来のプログラムのイメージとはまったく異なり、人間が答えているかのような揺らぎやブレを含んでいますよね。当初はそれに不気味さや不安を感じる人も多かったように思いますが、今はもう当たり前に受け入れられつつあります。
──生命的な存在に、人々が徐々に慣れはじめているのですね。今後、人工生命研究の成果はどのように応用されていくとお考えでしょうか。
今一番ホットなのは、AIとの合流です。AIの分野が長らく目標としていたのは、人間と同じレベルでタスクをこなせる汎用人工知能(Artificial General Intelligence)の実現ですが、こちらはあと数年ほどで可能になると言われています。そして次なる目標とされているのが、人間の知能を超える人工知能、スーパーインテリジェンス(SI)の実現です。
このSIを実現するためには、「自らを進化させる」性質をAIにもたせる必要があると言われています。これはまさに、人工生命研究が長年追いかけてきた「オープンエンドな(終わりのない)進化」というテーマであり、生命の重要な性質のひとつです。大規模言語モデルの登場以降、このオープンエンドな進化の実現が不可能事ではなくなりつつあるため、AIの研究者も人工生命の分野に強い興味をもちはじめているのです。

人工生命のオープンエンド性を社会で役立てるには?
──岡先生は、人工生命の研究者として大学に籍を置く一方で、株式会社ConnectSphereの代表取締役を務められています。大学での研究と、企業活動を通して社会に実装することには、どのような違いがありますか。
研究者は、ある課題に対して「こういう風にすれば解ける」という形で解を導きます。しかしそれは、研究というある種きれいに閉じた世界だからこそ成り立つものでもあるので、現実世界にそのまま応用できない場合も多いんですね。現実世界では「このデータは手元にないので使えません」とか「この情報は外に出せないんです」とか、色々な制約がつきまといます。
研究者にとってはストレスにもなり得ますが、その制約を取り除こうとすることで、また新たな研究課題が生まれるケースもありますよ。そうした回り道のきっかけを与えてくれることこそが、社会実装の醍醐味なのかもしれません。
──今後、企業活動にオープンエンド性を取り入れていく際にはどんなポイントが重要になるのでしょうか。
アイデアを生み出すために人工生命のオープンエンド性を活用できるといいでしょう。人間がプロセスを制御しない人工生命の振る舞いには、とてもユニークなアウトプットが含まれます。
あるグローバル企業では、たとえばAIを活用した施策を検討する際に、ヘッドクオーターを通してプロジェクトを承認するプロセスを設けているそうです。もし、アメリカで既に同様の活用事例があれば、日本では実施しないといいます。それだけ新しいアイデアが求められているということですよね。そういった、今までのやり方から脱却したい場合に、オルタナティブとして試す価値はありそうです。オープンエンドなアルゴリズムは最適化をめざす手法の一つとも捉えられるのではないでしょうか。
また、実際の応用としては、生成エージェントを用いることで、難易度が高いシミュレーションが可能になります。たとえば、「1000人がコミュニケーションする様子を観察したい」というニーズがあったとして、その企業がサンプルデータを100人分しか持っていなくても、大量のペルソナを生成することが可能です。それぞれが自律的な振る舞いを見せるので、数理的に行う場合と比べると、より現実に近いシミュレーションができるでしょう。
とはいえ、使う人のマインドセット次第でその成果は変わってくると思います。シミュレーションの結果に人間が分からないところが出てくるので、今までの人間が全てを設計して評価を決めたいというカチッとした世界観だと、取り入れにくいのです。
人間の生み出すノイズが、モビリティを進化させる
──先ほど飛行機や自動車の例が出てきましたが、生命らしいモビリティを実現するとしたら、どのような可能性があり得るとお考えでしょうか。
今の自動運転技術が目指しているのは、「人間が運転しなくても済む自動車」の実現ですよね。でも、私が興味を持ってあるのは、人間の意図を汲み取ってサポートしてくれるようなモビリティです。
というのも、私は地図を読むのがとても苦手で、スマートフォンの地図アプリもうまく使いこなせないんです。「この道を直進して、次は左折して……」というよくある道案内では、なかなか目的地に辿り着けません。なので、「まずはあの目印に向かって進んでみよう」と柔軟に教えてくれたり、わからなくなったらラフに質問できたりするような、対話的なナビゲーションがあったら嬉しいなと思っています。

──完全に自動化するのではなく、人間の意志決定を支援してくれるようなモビリティということでしょうか。
まさにそんなイメージです。「目的地に早く到着する」だけでなく、気分に合わせてあえて脇道を進んだり、気持ちよくスピードを出せる道を教えてくれたりするモビリティがあれば、運転する人間の能動性も刺激されますよね。人間が使う道具に関しては、完全な自動化よりも、生命的なゆらぎをもったパートナーのようなあり方のほうが求められている気がします。
もうひとつの方向性としては、「群れ」のように周囲の個体と連動するモビリティというのも考えられそうです。同じ道路であっても、とにかく急いでいる人もいれば、景色を楽しみながらのんびり運転している人もいますよね。そこをモビリティ同士で察し合いながら自動で調整できるようになれば、車間距離や車線といった人間のための交通ルールが不要になるかもしれません。
例えばインドでは、交差点でバイクや自動車がごちゃ混ぜになって行き交っていたりしますよね。一見無秩序で危ういように見えて、それぞれの個体が絶妙に相互作用しあっていて、むしろスムーズに感じられます。あれこそまさに、生命的な交通のあり方といえるのではないでしょうか。
──もし、人工生命的なモビリティと、人間が運転する従来の自動車が共存する状態になったら、どのようなことが起こるのでしょうか。
人工生命やAIにとって、人間は予想外な動きやノイズをもたらし、学習と進化を促す存在です。つまり、モビリティの学習という観点では、人工生命的なモビリティと人間の運転する車が共存するほうがいいですし、モビリティの種類も多種多様であったほうがいい。人工生命の研究者としては、ひとまずそんなふうに考えています。
もっと言うと、今までにない行動データを生成して人工生命を進化させるという意味では、運転が下手な人のほうが「優秀」と見なされるかもしれません。そうした逆転の発想が生まれるのが人工生命の面白いところですね。

──そう遠くない未来において、私たちは生命らしい振る舞いをする存在と、どのように共存できそうだとお考えでしょうか。
人工生命やAIを利用するとか、あるいは仕事を奪われないように競争するといった発想ではなく、得意なことを分担しあうパートナーのように考えていければいいと思います。ものづくりについて、新たなアイデアを生み出したり、最適解を計算したりすることに関しては、人間よりもAIのほうがずっと優秀です。
では、人間が得意なことは何なのか。それは、「選ぶ」ことだと思います。AIに出してもらったアイデアのなかから、適切なものを選んで決断する。来る人工生命の時代においては、それこそが人間の役割になっていくはずです。そうなった時、私たちの側にいるのは、どのように振る舞う人工生命であってほしいか。新しいパートナーのあり方を想像していけるといいのではないでしょうか。
〈岡瑞起さんからの問いかけ〉
「効率的な移動だけを目的とするのではなく、人間と一緒に探索してくれるパートナーとしてのモビリティがあるとしたら、どんなものになりますか?」